Build an Electronic Level with MPU-6050 and Arduino
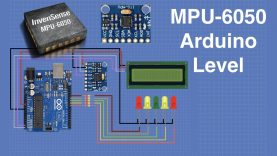
Today we will be working with the MPU-6050 IMU, and we will use it to build an electronic level with an Arduino.
Article with libraries and code – https://dbot.ws/mpu6050
More tutorials and projects at https://dronebotworkshop.com
Tell me what YOU want to see me create! Sign up for the newsletter at https://dbot.ws/dbnews and have your say!
The topic for this video and its accompanying article were suggested to me by some of my viewers using the survey form. If you would like to suggest a topic for more content you can do it using the survey form, the link is in every newsletter and in the welcome letter that you’ll receive when you join. Please note that this is the ONLY way I’m taking suggestions for new content.
Today we will be working with the MPU-6050, a low-cost Inertial Measurement Unit or IMU. This device has a lot of different applications in many fields including robotics, gaming, quadcopters, and IoT devices.
The MPU-6050 has an internal gyroscope and accelerometer. It’s an inexpensive device, available in several packages and modules. The module I am using is very common and has a built-0in voltage regulator so it can work with 5-volt logic.
We will start by looking at the MPU-6050 internals, as well as at the pinout of the module I am using.
Next, we will load a couple of libraries into our Arduino IDE and ruins some sample code to display Pitch, Yaw, and Roll.
After that, we will build a small project, an electronic level. Our level will display on an LCD and will also use 5 LEDs to give a good visual indication of how level the surface is.
Here are the contents for today’s video:
MPU-6050 Intro – 2:53
MPU-6050 Arduino Experiments – 11:20
Electronic Level – 20:29
You can get the sketch and the two libraries used in the experiments on the DroneBot Workshop website at https://dbot.ws/mpu6050 .
Hope you enjoy the video!
source


You might be interested in